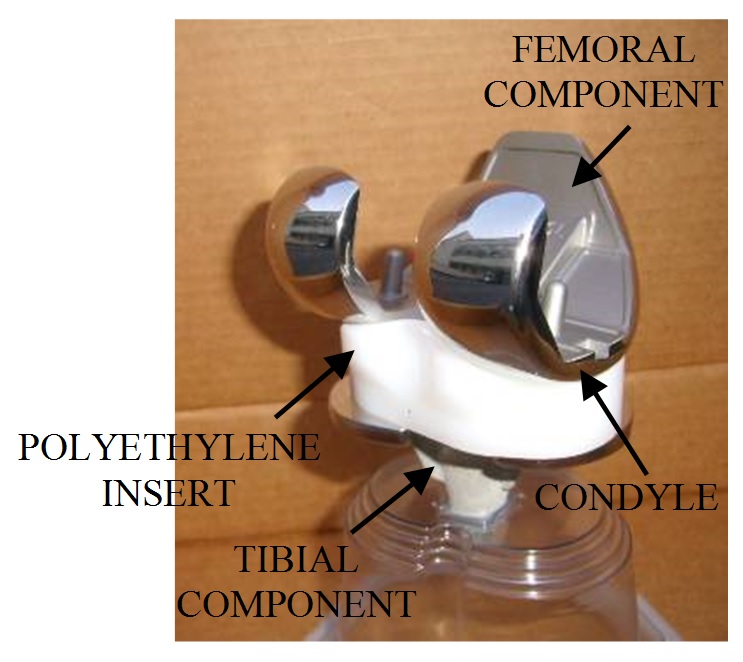
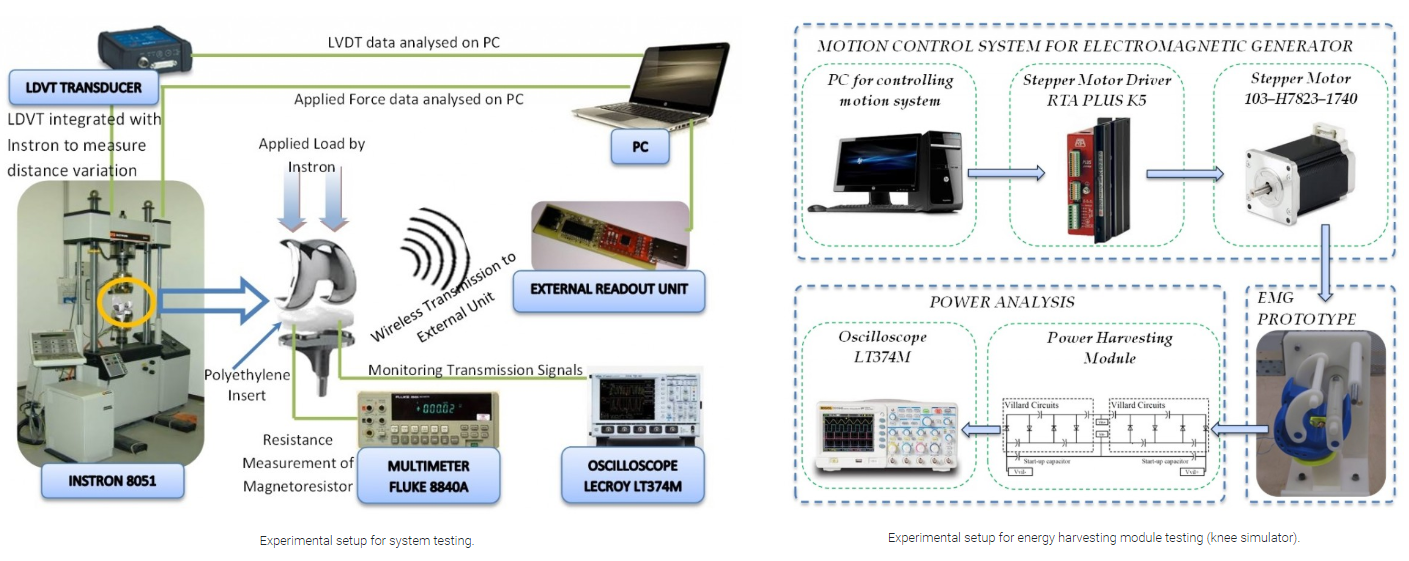
In vivo monitoring of human knee implants after total arthroplasty (total knee prostheses, TKP) increases the information concerning articular motion and loading conditions. The proposed autonomous sensor carries out force distribution measurements in a protected environment in real-time. Then, it performs a minimal data processing and wirelessly transmits measurement information directly from the inside of the implant to an external readout unit. The autonomous sensor is fully contained in implant’s polyethylene insert. In addition, it does not need batteries or cabled solutions for its supply. In fact, it exploites an electromagnetic energy harvesting module, which is implanted directly in the TKP. The energy harvesting module is composed by two series of NdFeB magnets, which are positioned in each of prosthesis’ femoral condyles, and a coil that is placed in a pin of the tibial insert and is connected to an implantable power management circuit. Energy is harvested from magnetic flux variation and induced voltage that are generated by knee movement. A TKP prototype with knee motion simulator has been realized in order to reproduce knee movement bio-mechanics and test energy harvesting module performance. So far, the module has been tested on different walking frequencies in order to observe the threshold frequency on which the energy can be harvested and accurate data transmission can occur. The data generated from the autonomous sensor will be useful for different applications. Indeed, the forces transmitted across knee joint during normal human activities such as walking, running or climbing can be directly measured. One of the main benefits derived from this added information is the longer duration of TKP tibial inserts. Furthermore, this device can be employed to carry out analyses aiming at improving implant design, refining surgical instrumentation, guiding post-operative physical therapy and detecting human activities that can overload the implant.
a
For more info, please contact Ahmed Khan or Mauro Serpelloni.

 a
a